Introducción
[Índice]Seguro que muchos de vosotros, a la hora de haceros con nuevos micrófonos para vuestro arsenal, sobre todo si estáis en este mundo del sonido simplemente porque sois aficionados, habréis pateado muchos hilos donde se habla sobre cuál micrófono es el mejor para según qué uso. Podréis haber comprobado que las opiniones son dispares. Cada uno, aunque a veces coincidimos, tiene sus micrófonos preferidos. No hablo solo de tipos de micrófonos, sino de modelos determinados con nombres y apellidos. Estas preferencias vienen dadas por la experiencia de haber probado muchos micrófonos en diferentes aplicaciones. Lo malo es que la mayoría de gente que no se dedica profesionalmente a este mundillo no tiene esa posibilidad y se sienten perdidos a la hora de saber qué micrófono comprar para cubrir ciertas necesidades.
Cualquiera que tenga interés en conocer a fondo las características y el funcionamiento de micrófonos tiene infinidad de libros, a cual mejor, para ello. La finalidad de este artículo es la de poner a vuestra disposición un texto ligero sin mucha carga teórica que os permita, simplemente conociendo determinadas características de un micrófono, saber qué uso podríais hacer de él, independientemente de que conozcáis los modelos más populares.
Antes de empezar a ver diferentes aspectos de los micrófonos quiero que tengáis claro de que, sea como sea, un micro es tan solo un dispositivo que transforma sonido en audio, es decir, convierte variaciones de presión sonora en una señal eléctrica. La forma en la que se hace esa conversión nos determina si un micro es indicado para una aplicación o no.
Tipos de micrófonos
[Índice]Lo más determinante en un micrófono es el método que usa para convertir la presión acústica en electricidad, y aunque luego cada modelo de cada marca tiene unas especificaciones determinadas, todos los micros que usan uno u otro método de conversión poseen unas características comunes. En este artículo solo haremos referencia a los métodos que usan los micros que solemos encontrar en los estudios de grabación, y como este artículo no pretende ser un texto riguroso a nivel de ingeniería y si un texto con carácter práctico os voy dividir los tipos de micrófonos tal y cual yo siempre lo he hecho.
Micrófonos de campo magnético
[Índice]Estos micrófonos se basan en la inducción electromagnnética, es decir, la aparición de una diferencia de potencial (voltaje) en un cuerpo expuesto a un campo magnético variable. Vamos a ver esto de forma que se entienda fácilmente.
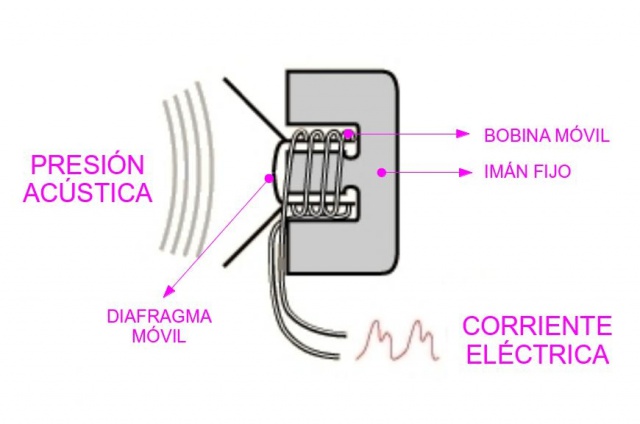
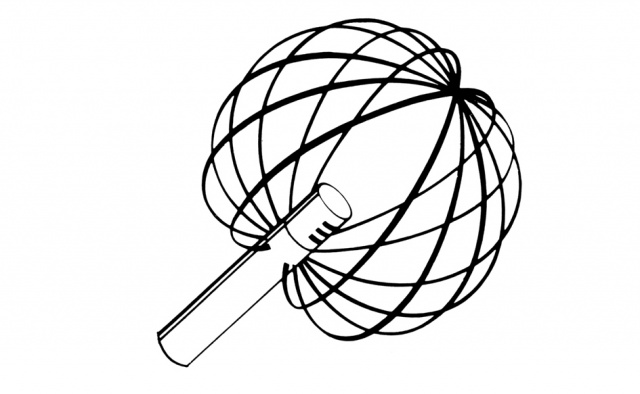
Esquema básico de un micrófono dinámico
En esta imagen podemos ver el esquema básico de un micrófono dinámico, el cual se basa en la inducción electromagnética. El funcionamiento es muy sencillo. Las variaciones de presión sonora mueven el diafragma, al cual hay unida una bobina, la cual a la vez está en medio de un campo magnético generado por imanes. Este movimiento provoca que la bobina, al moverse dentro de un campo magnético “vea” variaciones en dicho campo, generándose así una variación de potencial eléctrico en sus extremos y por tanto generando una corriente eléctrica. Cuanto más empuje la presión sonora el diafragma más corriente eléctrica vamos a generar.
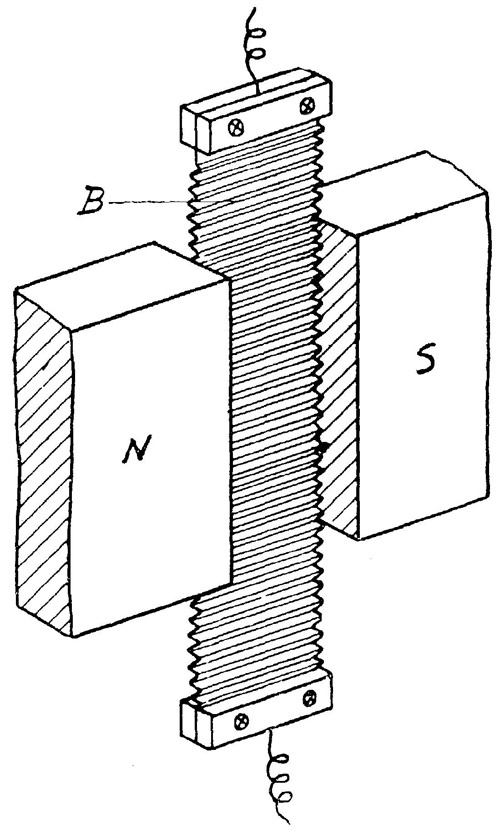
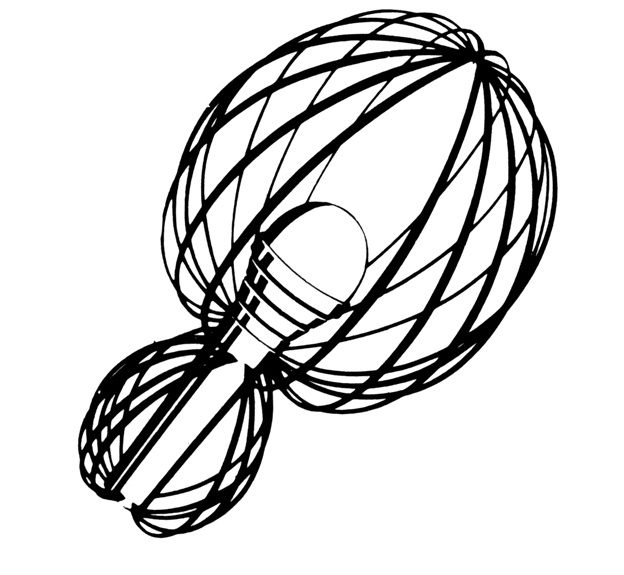
Esquema básico de un micrófono de cinta (imagen: Wikipedia)
El otro tipo de micrófono basado en inducción electromagnética es el micrófono de cinta. El funcionamiento básico es el mismo que el micrófono dinámico pero se sustituye el diafragma y la bobina móvil por un solo elemento. Este elemento es una cinta muy fina y ancha de aluminio. Las variaciones de presión acústica mueven la cinta dentro del campo magnético, generando la correspondiente variación de potencial eléctrico.
En ese vídeo podéis ver una comparativa de dos cintas usadas en este tipo de micros:

Comparación de materiales usados para las cintas realizado por Michael Joly de OktavaMod
Los micrófonos “de campo magnético” tienen la característica que de sus partes móviles son bastante pesadas, más en los micros dinámicos que en los de cinta. Esto provoca que a altas frecuencias, que es donde más rápido se mueven las partes mecánicas, ese peso suponga un problema. Esto lo que hace es que este tipo de micros no tengan una buena respuesta a altas frecuencias. La caída típica a altas frecuencias en un micro dinámico suele ocurrir sobre los 10kHz. Como en los micros de cinta usan un material menos pesado que los dinámicos, esta caída a altas frecuencias suele darse a partir de 14kHz, por lo que estos micros tendrán una mejor respuesta en frecuencias altas que los dinámicos.
También debido a ese peso de las partes móviles los micros dinámicos suelen tener un pico entre 2 y 8kHz.
Respuesta en frecuencia del micrófono Shure SM57 (dinámico)
En esta imagen podéis ver la respuesta en frecuencia de un Shure SM57, donde se ve de forma clara la caída a altas frecuencias y un pico sobre 4 y 6kHz.
Aparte de esas características frecuenciales hay que tener muy en cuenta la robustez de estos tipos de micros. Mientras que los micros dinámicos le puedes hacer todas las perrerías que queráis (hay que ser muy bestia para romper un dinámico), los micros de cinta son muy delicados. Hay que tener en cuenta que la cinta es un elemento delicado y como tal se puede romper con facilidad, tanto por manejarlos sin cuidado como por ponerlos cerca de una fuente con mucha intensidad sonora. Cuando compréis un micro de cinta averiguad la presión sonora máxima a la que podéis exponerlo (esa característica la veremos más adelante).
En cuanto a los micros de cinta debéis tener en cuenta que debido a sus características constructivas son micros que dan una señal de salida muy débil, por lo que hay que apretarle bien a los previos donde los tengáis conectados. De hecho si el previo que queréis usar no tiene suficiente ganancia casi que busquéis otro por mucho que os guste ese.
Micrófonos capacitivos
[Índice]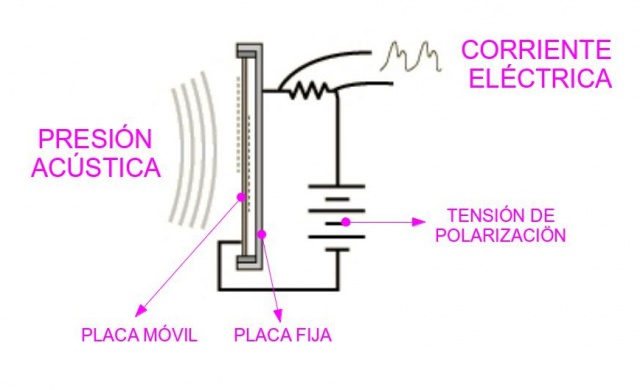
Esquema básico de un micrófono de condensador
El funcionamiento de este tipo de micrófonos se basa en los cambios de capacidad de un condensador formado por una placa fija y otra móvil. La placa móvil actúa como diafragma, es decir, se mueve en función de la presión acústica que se le aplica. La separación entre la placa fija y la placa móvil, al ser variable, crea diferentes valores capacitivos entre ambas placas, lo que provoca una diferencia de tensión proporcional a la presión acústica aplicada en el diafragma.
Para que este tipo de micrófonos funcionen es necesario que placas tengan una polarización inicial. Si nos centramos en cómo se realiza esta polarización entre placas nos encontramos con dos tipos de micros. Por un lado tenemos los micrófonos de condensador (como el del diagrama anterior), el cual usa una fuente de alimentación para dicha polarización. Por otro lado tenemos los micrófonos electret, que usan un material especial de construcción que hacen que sus placas estén permanentemente polarizadas, por lo que no necesitan una alimentación de polarización externa.
Hay que tener en cuenta también que estos tipos de micrófonos otorgan una señal en la salida de la cápsula demasiado baja, por lo que necesitan circuitos amplificadores. Puesto que esa señal es muy débil y el uso de cables largos en ese punto arruinaría su integridad, el circuito amplificador se coloca en el propio cuerpo del micrófono. Este circuito amplificador puede ser un circuito basado en válvulas o en un circuito basado en transistores FET. Los micrófonos electret usan circuitos FET como norma general, con la peculiaridad como ya hemos dicho de que no necesitan de una alimentación de polarización para su funcionamiento. Los micrófonos de condensador pueden usar tanto amplificadores basados en válvulas como circuitos basados en FET. Cuando usemos micrófonos de condensador basados en FET la necesaria tensión de polarización suele aplicarse desde el previo de micro o la mesa a la que hayamos conectado el micro (normalmente de +48v de tensión continua, llamada alimentación fantasma o phantom). En cuanto a los micrófonos de condensador basados en válvulas tenemos varias peculiaridades. Por un lado el tamaño de las válvulas hace que el cuerpo de este tipo de micrófonos sea bastante voluminoso. Por otro lado, las características de alimentación necesaria de las válvulas hace que este tipo de micrófonos necesiten de una fuente de alimentación especial para ellos. Esto hace que la tensión de polarización necesaria en las placas sea entregada a través de la fuente especial del micrófono, por lo que no necesitaríamos una alimentación fantasma externa.
Aunque ya veremos más características de estos tipos de micrófonos más adelante, lo que sí podemos adelantar es que al ser sus partes mecánicas mucho más livianas que el caso de los micrófonos “de campo magnético”, a altas frecuencias la masa es mucho menos determinante, por lo que la respuesta en frecuencia es mucho más plana que los micrófonos dinámicos y de cinta.
Especificaciones de un micrófono
[Índice]Patrones polares
[Índice]El patrón polar de un micrófono es una representación gráfica de la respuesta direccional del micrófono. Es decir, de cómo responde el micro al sonido dependiendo del ángulo desde el que le llegue. Hay que tener en cuenta que la respuesta direccional de un micro no es la misma a diferentes frecuencias. A bajas frecuencias la respuesta direccional suele ser ancha, estrechándose a medida que la frecuencia aumenta.
Diagrama polar donde podéis ver la respuesta direccional dependiente de la frecuencia.
También hay que tener en cuenta que los patrones polares son una representación en dos dimensiones de un fenómeno que ocurre en tres dimensiones. Digo esto porque a veces a la gente le cuesta mucho extrapolar estos patrones a aplicaciones prácticas reales.
Existen tres tipos fundamentales de patrones polares: Direccional, onmidireccional y bidireccional.
Omnidireccional (imágenes 3D de AKG)
Los micrófonos con patrón omnidireccional no discriminan el sonido en función de su procedencia, es decir, captan el sonido por igual independientemente de donde venga. Cuando usamos micrófonos con este tipo de patrón polar nos va a ser imposible discriminar sonidos dependiendo de su procedencia, por lo que la toma va a estar expuesta a la fuente que queramos grabar y a otras fuentes que actúen a la vez. Además debemos tener en cuenta que este tipo de micros van a recoger una cantidad considerable de ambiente acústico de la sala donde estemos grabando.
Bidireccional (figura en 8)
Los micrófonos bidireccionales (o figura en 8) son micrófonos que captan por igual sonidos que provienen de su parte frontal como de su parte trasera, ignorando lo que incide en sus laterales. La figura en 8 es típica de los micrófonos de cinta debido a colocación de la cinta, aunque hay métodos constructivos para hacerlos direccionales. Por ejemplo podemos usar este tipo de micros cuando queramos captar en la misma toma dos fuentes de sonido enfrentadas o si requerimos alguna técnica microfónica estéreo basada en uno o más micros bidireccionales (como la técnica Blumlein).
Cardioide
Supercardioide
Los micrófonos con patrones polares direccionales captan sonido principalmente de su parte frontal e ignoran lo que proviene de su parte trasera. Dependiendo de lo mucho que estrechen su diagrama polar en su parte frontal podemos hablar de micrófonos cardioides o supercardioides. Los supercardioides tienen la cualidad de que aunque estrechan el diagrama polar en su frontal son más sensibles a sonidos procedentes de su parte trasera. Este tipo de micrófonos son de uso casi imprescindible cuando se quiere aislar la toma de una fuente sonora en ambiente muy ruidoso o cuando interactúa con otras fuentes simultaneas (como el caso de que queramos grabar diferentes elementos de una batería por separado o si queremos reforzar por ejemplo en una grabación sinfónica únicamente una determinada sección).
Sensibilidad
[Índice]La sensibilidad de un micrófono hace referencia al nivel de salida que vamos a tener ante una determinada presión acústica. Un micrófono con baja sensibilidad dará un nivel de señal de audio a su salida ante un determinado de nivel acústico de una fuente más bajo que otro con mayor sensibilidad. Hay que tener en cuenta que los micrófonos que suelen tener más sensibilidad, debido a que como ya hemos visto poseen un circuito amplificador en el propio cuerpo, son los micrófonos de condensador, mientras que los que menos sensibilidad suelen tener son los micrófonos de cinta.
No penséis en que la sensibilidad está directamente relacionada con la calidad sonora del micrófono, ya que tan solo afecta a cuánto debemos apretar el preamplificador donde hayamos conectado el micrófono. Hay que tener en cuenta que un preamplificador a medida que aumentamos su ganancia se hace más ruidoso, por lo que la sensibilidad es muy importante a la hora de elegir un micro para una determinada aplicación, ya que por mucho que nos guste un micrófono a lo mejor no podemos usarlo para grabar según que fuente sonora. Por ejemplo podemos imaginar que un micrófono de cinta que tenga muy baja sensibilidad será totalmente inutilizable a la hora de grabar una pieza de música de cámara, ya que las partes “piano” de la obra en las que hay muy poco nivel nos obligaría a subir mucho la ganancia del preamplificador y probablemente añadiríamos un ruido que arruinaría la grabación. Otra cosa es que hay en el mercado preamplificadores muy silenciosos y que tienen un ganancia máxima muy alta, pero eso ya se comentará en algún otro artículo.
No entraremos en detallar cómo se mide científicamente la sensibilidad de un micrófono. Quien quiera podrá encontrar documentos interesantes en internet si quiere profundizar en esto. Lo que tenéis que tener en cuenta es que las grandes diferencias de sensibilidad entre micros viene dada por la tipología del micro (si es de cinta, de condensador, etc)
Ruido propio
[Índice]Lo primero que debemos de tener en cuenta es que los únicos micrófonos susceptibles de contar con ruido son los micrófonos capacitivos (electret y de condensador). Esto se debe al circuito amplificador que poseen dentro de su propio cuerpo y que como todo circuito electrónico genera ruido. Los micrófonos de válvulas suelen ser típicamente más ruidosos que los micrófonos con tipología FET. Los micrófonos de campo magnético (dinámicos y de cinta) no tienen ruido propio tan destacable.
Como ya dijimos, la finalidad de este artículo no es la de proporcionar un texto científico y por tanto no explicaremos cosas que sean difícilmente entendibles, así que tened en cuenta que un ruido propio por debajo de 30dB SPL es un ruido aceptable, y si está por debajo de 20dB SPL es excelente.
Nivel máximo de presión acústica
[Índice]Es el nivel máximo al que un micrófono empieza a distorsionar, es decir, el nivel máximo de presión acústica que podemos aplicar un micro sin que se produzca distorsión en su salida. Típicamente los micrófonos dinámicos son los que aguantan un nivel de presión sonora mayor, y los de cinta los que menos aguantan. Un nivel máximo por encima de 135dB SPL es bueno y por encima de 150dB SPL es excelente.
Debéis tener en cuenta que cuanto más cerca pongáis el micro de una fuente sonora, mayor nivel de presión acústica va a soportar el micrófono. Por ejemplo, en aplicaciones donde tengamos una fuente que genere mucho nivel de presión acústica y debamos usar micrófonos que están muy cercanos a la fuente, es normal encontrar micrófonos dinámicos (como por ejemplo una caja o un timbal de batería).
Respuesta en frecuencia
[Índice]La respuesta en frecuencia (de la que ya hablamos en la sección de tipos de micrófonos) hace referencia a los cambios de sensibilidad del micrófono en función de la frecuencia. Por norma general los micrófonos de condensador son los que tienen una respuesta en frecuencia más lineal.
No hay que pensar que la falta de linealidad de la respuesta en frecuencia en un micrófono sea un defecto, si no algo con lo que podemos jugar. De hecho muchos opinan, entre los que me incluyo, que la mejor ecualización se obtiene directamente en la propia grabación, y os podéis imaginar que el uso de un micro con una determinada respuesta en frecuencia juega mucho en ese aspecto.
Si recordáis la respuesta en frecuencia del Shure SM57 que ya vimos, os podéis hacer una idea de que no es para nada lineal, y sin embargo es un micrófono de los más usados a nivel profesional. Por ejemplo en cajas es el más usado debido a, entre otras cosas, al pico que tiene sobre 5kHz, que es justo donde la caja tiene su pegada. Otro ejemplo de como esta respuesta alineal del SM57 nos puede ayudar es en voces: cuando yo grabo a bandas de metal muy bestias donde los instrumentos crean una base muy compacta y rica en armónicos suelo usar en SM57 para las voces. Lo que hago es grabar en esos casos la voz siempre con dos micros, un SM57 y alguno de condensador de válvulas y dependiendo de la parte cojo una u otra pista. La curva frecuencial del SM57 es muy buena para hacer que la letra se entienda bien aun cuando hay mucha densidad musical. Como veis, hay respuestas frecuenciales que se adaptan mejor que otras a diferentes fuentes acústicas.

Ingeniero técnico de telecomunicaciones. Músico y productor afincado en México, responsable de los estudios Uniphonic y profesor de acústica, electrónica, grabación y mezcla en Rec - Centro de estudios Musicales.








