Micrófonos de presión y gradiente y el efecto de proximidad
Para conocer o recordar lo básico de los tres tipos de micro más habituales (de bobina, de cinta, y de condensador; tres tipos de transductor) podéis leer el tutorial de José A. Medina ‘Características y uso de los micrófonos’. Hoy quería comentaros una diferenciación menos nombrada, pero no menos importante: la que distingue entre los micrófonos que actúan en modo presión y en modo gradiente. Impacta enormemente en los resultados y justifica algo tan importante como es el efecto de proximidad que exhiben muchos micrófonos.
Sensores de desplazamiento y velocidad
[Índice]Además de distinguir los transductores por su aspecto más físico, podemos también diferenciar por qué es lo que captan. La forma en la que la presión sonora afecta a la velocidad de movimiento de las partículas en el aire y a la amplitud del desplazamiento que sufren es diferente. Mientras para una misma presión sonora la velocidad de las partículas es la misma para cualquier frecuencia, la amplitud del movimiento de esas partículas es menor ante señales de alta frecuencia que en las de baja (la longitud de onda es mayor en bajas y las partículas tienen mayor excursión).
Pero entre la velocidad y el desplazamiento existe una relación sencilla, y por ello existen y se usan con éxito para realizar micrófonos sensores de ambos tipos. Los transductores capacitivos y también los de carbón y los piezoeléctricos generan voltaje proporcional al desplazamiento, no a la velocidad. Los sensores basados en inducción electromagnética, como son los micros de bobinas móvil y los de tipo cinta, captan la velocidad del movimiento de las partículas del aire y la reflejan en forma de una señal eléctrica.
Pero el que el elemento sensible sea de uno de esos dos tipos es sólo una parte, importante pero no suficiente, para entender la respuesta final de un micrófono. El sensor está incorporado las más de las veces en un cuerpo de micrófono que altera los resultados de forma importante. Las cavidades y vericuetos que puede recorrer el sonido dentro de un micrófono pueden alterar la respuesta ‘nativa’ del sensor hacia una configuración bien diferente, por no hablar de la electrónica que puedan llevar en su cuerpo (sea pasiva o activa cuando llevan alimentación), o del posible uso de dos capsulas combinadas en un único micrófono.
De hecho los elementos más importantes de decantarnos por un tipo de sensor son otros, no tanto el que actúe por velocidad o por desplazamiento.
- Bobina: robustos frente a la climatología y a cierto maltrato; su nivel es bajo (como en todos los micrófonos) pero mayor que los otros, suficiente para viajar por un enlace de cable adecuado; por tener mucha masa (diafragma+bobina) tienen una caída temprana que comienza en torno a 10kHz y que se compensa a base de ecualización acústica o electrónica.
- Cinta: su masa es mucho menor y la caída sucede más arriba, típico unos 15kHz; nivel de salida muy bajo que exige previos de ganancia extremadamente alta; exponen las dos caras de la cinta y generan por ello respuesta ‘figura de ocho’.
- Condensador: ofrecen un menor ruido de manipulación (frente a movimientos del micrófono o de su soporte, etc.); su resultado suele ser bastante neutro/plano en frecuencia y puede llegar a frecuencias altas; necesitan polarización (salvo en los electret); nivel bajo que obliga a un primer amplificador en el propio cuerpo /(lo que limita el margen útil: por abajo su propio ruido interno y por arriba la posible saturación).
Pero al final el transductor usado no lo dice todo y no podemos decidir sólo por bobina/cinta/condensador. Más allá hay otras diferencias muy importantes.
El transductor no lo es todo: micros de presión y de gradiente
[Índice]Además de interesarnos por el tipo de sensor, deberíamos interesarnos por otra clasificación según la cual se distinguen:
- micrófonos sensibles a la presión y
- micrófonos sensibles al gradiente de presión (a veces llamados sensibles a la velocidad)
La diferencia proviene de que ya sea por el transductor en sí y/o construcción del micrófono se obtiene finalmente una acción sensible a la presión en un punto o cara, o a la diferencia de presión entre dos puntos o caras.
Los micrófonos sensibles a la presión son típicamente micrófonos en los que sólo una de las caras del transductor está expuesta al ataque de la señal acústica. Y reaccionan (sea como fuere su sensor, velocidad o desplazamiento) a la actividad sonora que llega desde el aire al captador en esa única cara. Obviando de momento el que el tamaño del sensor nunca es despreciable, podemos pensar que se mide la señal que existe en una única localización, en un único punto: en esa única cara útil.
En principio parecería que el tipo de captación de los dinámicos (cerrados traseramente por el imán) y los de condensador (con sólo una de las dos placas móvil) sería de este tipo, aunque como veremos en seguida no todos lo son, porque se usan trucos para hacerlos sensibles a gradiente, al menos parcialmente.
Los sensibles al gradiente (o diferencia) de presión tienen como caso más evidente los micros de cinta. Los micros de cinta reciben señal por sus dos caras y por tanto lo que obtienen es la diferencia entre la actividad que llega por delante y la que llega por detrás (que por actuar en sentido contrario sobre la cinta ‘resta’, de ahí el comportamiento diferencial). Se entiende claramente en ellos el concepto de que miden el gradiente o diferencia entre esas dos caras.
Pero también son micrófonos de gradiente muchos de los de tipo dinámico y de condensador porque en ellos se han introducido modificaciones para resultar en una acción ‘diferencial’. Por ejemplo usando dos cápsulas dentro del micrófono o introduciendo ‘puertas traseras’ y caminos acústicos internos que permitan que además de la señal recibida frontalmente de forma directa, haya un segundo camino por el que llegue también señal al sensor con un retardo algo mayor. Las dos cápsulas distantes y en oposición o los dos caminos de señal (uno de ellos con la entrada de sonido ‘desde atrás’) resultan en la acción ‘gradiente’.
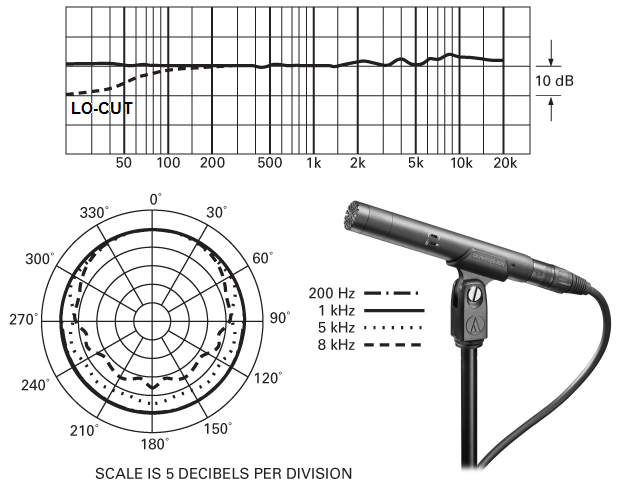
En esta imagen de un micro Audio-Technica AT 8033, de condensador, se aprecian con claridad las entradas ‘traseras’ que dan paso a un segundo camino de acceso del sonido, diferente al que corresponde al frontal/principal. Habría que ver fotos del interior para encontrar como esos ‘rear ports’ terminan de encaminar el sonido trasero hacia el diafragma, en todo caso siguiendo una ruta diferente.

Al revés es también posible (aunque nada habitual) encontrar micrófonos que usan cinta pero en los que se ha aniquilado el camino trasero, tapándolo, para configurar una acción que intenta ser más ‘de presión’ que de ‘gradiente’.
Todo un galimatías de posibilidades en el que no basta saber el tipo de sensor para identificar cómo actúa un micrófono. Así, en muchos catálogos de los fabricantes de micrófonos veréis que de cada referencia os indican si es un micrófono que opera en modo presión o en modo gradiente. En algunos se ofrecen varias cápsulas para elegir y montar en cada momento el tipo de respuesta preferido.
La diferencia presión/gradiente habla, entre otras cosas, de una diferencia entre carácter omnidireccional (micros de presión) y fuertemente direccional (propia de los de gradiente).
Presión->omni. Gradiente->direccional
[Índice]La respuesta de los micros de presión tiende a ser de tipo omnidireccional. Puede resultar algo sorprendente la afirmación de la ‘omnidireccionalidad’ asociada a la única cara de los sensores de presión. Al fin y al cabo ¿no dará ‘sombra’ la cara que no es activa en el sensor? Pensadlo en un micro de condensador. Sólo una de las dos placas es móvil y recibe la actividad sonora. La otra parecería ser una auténtica ‘pantalla’, que impide el acceso directo de las señales que vienen desde atrás… Y sin embargo ¿decimos que es omnidireccional? Efectivamente es así, omnidireccional, al menos para las señales audio cuyas longitudes de onda superan el tamaño del propio micrófono y para las que por tanto no hay obstáculo significativo y la onda los atraviesa. En las frecuencias algo mayores puede empezar a aparecer un carácter más direccional por la ‘sombra’ del propio micro.
Por eso en los catálogos es habitual distinguir los micros de condensador de diafragma pequeño y de gran diafragma. Con tamaños pequeños del sensor, la difracción será eficaz para ‘recuperar’ las señales que vienen desde cualquier dirección sobre el micrófono. La frecuencia en la que ese comportamiento omni deja de ser eficaz y se vuelve más directivo está vinculada al tamaño, pero en todo caso suele ser alta, comparada con la frecuencia a la que los dinámicos empiezan a recortar. En el caso de los micros dinámicos su respuesta ya empieza a caer en frecuencias a las que la pérdida del carácter omni no tiene porqué ser todavía acusada.
Por el contrario los micros de gradiente de presión corresponden a respuestas direccionales, como de nuevo evidencia con claridad el micrófono de cinta y su patrón polar en figura de ocho: no captará señal que emane desde ningún punto en el propio plano de la cinta. Tiene su máximo de captación ‘delante’ y ‘detrás’ de la cinta, pero sensibilidad mínima a cualquier cosa que venga a 90º, desde el propio plano de la cinta. En los micros de gradiente hay dos lugares en los que se capta el sonido y además se capta ‘en oposición’. Sucede de forma natural en la cinta y sus dos caras, o sucede reuniendo en un solo cuerpo dos sensores de tipo capacitivo ‘espalda contra espalda’ y por tanto generando también dos caras.
Hay también micros que combinan el modo presión y el modo gradiente. Es el caso de tantísimos micros dinámicos y de condensador que, por construcción, acaban teniendo varios caminos abiertos para señal delantera y trasera que combinados dan patrones cardiodes o hipercardiodes en lugar de omnidireccionales. Otros sistemas también actúan ‘por gradiente’ a base de formar dos caminos de señal dentro del cuerpo del micrófono o combinando dos cápsulas. Es clásico el uso de una omni junto a una figura de ocho para generar un patrón cardioide mezclándolas a partes iguales, pero jugando con otras mezclas diferentes de ambas señales se pueden tener patrones polares variables continuamente desde omni a cardioide y más allá hacia super e hipercardioide o finalmente la figura de ocho.
En seguida nos interesaremos por cómo los de tipo gradiente manifiestan un fenómeno característico: el efecto de proximidad. Algo que vamos primer a observar a partir de dos ejemplos.
Algunos ejemplos
[Índice]Fijaos en cómo este micro omnidireccional AT4022 de Audio-Technica, de pequeño condensador, con una sola cara útil, carente de otras entradas que no sean estrictamente la frontal (sin 'rear ports') acaba teniendo una respuesta sumamente plana y extensa y un carácter omni para todas las frecuencias, que sólo se matiza un poco en las altas con menos de 10dB de preferencia por la llegada frontal (y eso, como decíamos, a pesar de que pudiéramos pensar en la posible 'sombra' del cuerpo del micro: ya veis que no afecta acústicamente salvo a frecuencia muy altas).
El sonido de un micrófono de este tipo no tiene porqué ser, pese a su bondad de cifras, el de mejor valoración para cualquier uso. Puede ser neutro, pero no es eso siempre lo que se desea de un micrófono y por eso los catálogos son tan amplios en variantes. Su pequeña superficie le permite mantener el carácter omni muy arriba, aunque eso también causa que no recoja tanta señal como otro de mayor tamaño. Algo que solía tiempo atrás comprometer la relación señal a ruido, aunque a día de hoy las figuras de ruido de este tipo de micros son también muy buenas (en este caso del AT 4022 se trata de sólo 13dB SPL de ruido equivalente de entrada -EIN- para un micro cuyo máximo SPL está por encima de 140dB SPL).
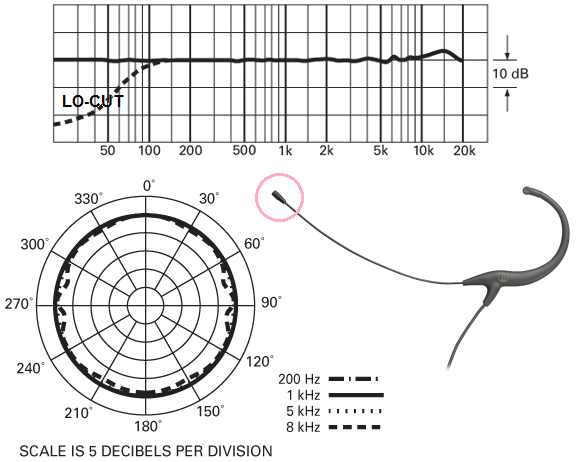
Fijaos como en este otro modelo, AT BP 892, de aún mucho menor tamaño de sensor como corresponde a un micro 'de cabeza' que debe ser poco visible, consigue mejorar su respuesta 'omni' en altas:
Por comparación frente a los omni, contrastad con estas características de otro micro. Me voy ahora a Shure, y en lugar del clásico SM58 os muestro datos del Beta 58A. Un dinámico con respuesta cardioide y de tipo gradiente, gracias a la estructura interna que proporciona dos caminos hacia el diafragma.
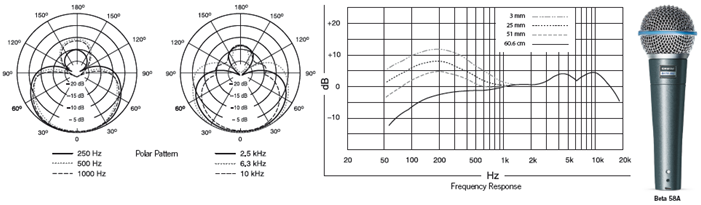
Llama la atención un doble realce en altas a 4kHz y 9,5kHz aprox. Se ha buscado compensar (incluso invertir) el corte temprano típico de los micros dinámicos subiendo artificialmente el nivel en altas a base de un diseño acústico de cavidades que introduzca esos énfasis. Una coloración artificial y forzada que lo hace menos neutro pero útil para dar más brillo/presencia a los cantantes/instrumentos. Pero además destaca el hecho de que la respuesta en graves tiene una caída pronunciada en el uso 'normal' a cierta distancia (indicado en la curva de 60 cm) y que ese rebaje se convierte en realce a distancias muy cortas (con curvas indicadas para 5.1cm, 2.5cm, y 3mm). Usado en proximidad a la fuente aparece un destacadísimo refuerzo centrado en 200Hz y cuya campana se extiende más de una octava a cada lado.
De hecho este tipo de caídas en graves son muchas veces un resultado provocado a propósito: sabedor el fabricante de que el diseño reforzará graves a distancias cortas, y sabiendo que los micros dinámicos de este tipo de gama se usan mucho para 'en vivo' (y por tanto a esas cortas distancias), está diseñado para ofrecer en su respuesta natural esa caída en graves que podrá ser compensada por proximidad, dando mucho juego al intérprete para variar su sonido con la separación (desde un rebaje a un refuerzo de la zona del fundamental y los primeros armónicos). Pero ¿de dónde surge ese realce de graves en proximidad?
Micros de gradiente y el efecto de proximidad
[Índice]El llamado ‘efecto de proximidad’ (que veíamos en la figura anterior) es una característica que exhiben los micrófonos de gradiente y que no sucede en los de presión u ‘omni’ y por la que se produce un refuerzo de las frecuencias graves cuando se usan de forma muy próxima a la fuente de la que emana el sonido.
Suele decirse que todos los micros direccionales tienen efecto de proximidad, lo cual no es del todo falso ni del todo cierto. Se presenta en los micros de gradiente, que calculan la diferencia entre dos captaciones del sonido. Este tipo de micros son de naturaleza direccional como un efecto importante. Pero la razón de que aparezca el efecto de proximidad es el hecho de que son micros de gradiente. Por ejemplo un micro de presión de tipo PZM (pressure zone microphone) manifiesta directividad (sólo recibe en una semiesfera) pero su carácter directivo proviene de la ‘sombra’ que crea para la otra semiesfera, no de una acción gradiente propiamente dicha. Y efectivamente un PZM es un micro directivo pero libre de efecto proximidad.
Así que vamos a ver el origen del efecto proximidad, vinculado al carácter de micro de gradiente y su ejemplo máximo de los micros de cinta.
La señal que alcanza a las dos caras útiles del micro de gradiente recorre caminos ligeramente diferentes y por tanto llega un poco más tardía a una (digamos la ‘trasera’ respecto a la ‘frontal’). Eso provoca que haya una diferencia de fase, que es más significativa para frecuencias agudas que para graves. La distancia que separa ambas caras es poca, desde luego mucho menos que las longitudes de onda de metros y metros en el registro grave y medio (aunque en algunos casos sí puede ser comparable a la de las componentes más agudas). [Recordad que 20kHz implican una longitud de onda de aprox 1,7cm, y 20Hz corresponde a 17m]
La pequeña distancia que separa las dos caras es irrelevante para señales graves, su fase apenas cambia en tan corto recorrido. Como resultado la cancelación en graves es mayor (están casi en fase) y la tendencia natural de un sistema basado en gradiente sería una respuesta pobre en graves y más alta en agudos (a razón de unos 6dB/oct). Esa tendencia se compensa en el diseño de este tipo de micrófonos incorporando elementos acústicos que devuelvan un resultado básicamente plano. Por ejemplo en un dinámico realizando una amortiguación del diafragma.
El cálculo de esa amortiguación está pensando para situación de uso del micro ‘a distancia’, cuando ya puede considerarse que hay una onda plana, no esférica. Ese modelo de onda plana permite suponer que esa mayor distancia no reduce el nivel de la señal captado aunque nos desplacemos un poco más lejos. El nivel que llega a ambas caras es equiparable y las diferencias que pueda haber son sólo por culpa de la diferente fase, generando ese comportamiento final ‘selectivo en frecuencia’.
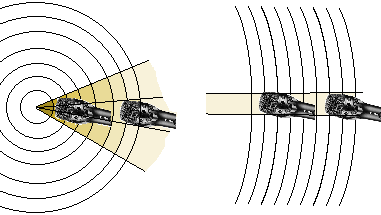
La imagen muestra dos posiciones de un micrófono, pero nosotros estamos hablando de dos partes o caminos internos del micrófono que captan sonido y entre las que media una mucho más corta distancia, de apenas unos centímetros.
En las proximidades de la fuente (hablamos de colocar el micro a menos de 2 cm de la fuente o incluso a medio centímetro o menos), la propagación es todavía muy claramente esférica e impacta en los resultados incluso ante esas pequeñas diferencias de distancia que corresponden a los dos captadores/caminos de un micro de gradiente. La diferencia de nivel que captan los dos elementos del gradiente se llega a deber principalmente a la regla de la caída de la energía con el cuadrado de la distancia que todavía es significativa a esas cortas distancias. El que los dos captadores o caminos tengan una diferencia de sólo 2cm significa doblar o más el recorrido cuando estamos pegados a la fuente. Por el contrario a distancias de 60 cm (y no digamos más allá) un extra de 2 cm es porcentualmente minúsculo, no genera tanta pérdida de nivel.
En distancias cortas aparece por tanto en los micros de gradiente una componente captada por la diferencia de nivel, que no depende de la frecuencia (de respuesta ‘plana en frecuencia’). Es debida a la diferencia de presión por la distancia, no por una diferencia de fase.
Esa componente ‘plana en frecuencia’ dominante a cortas distancias, se ve sometida a la compensación (refuerzo en graves) que se ha introducido en el micrófono para que funcione ‘bien’ (sin coloración) usado a distancias más normales. El resultado a distancias cortas es que se produce un evidente incremento de graves en la respuesta, tal como veíamos en la figura del Beta 58A.
Por el contrario, los micrófonos de presión pueden tener una respuesta en frecuencia notablemente plana y generalmente amplia. Al estar expuesta sólo una cara, no existen las cancelaciones de fase propias de un micro de gradiente, que son las que introducían coloraciones, y por tanto no se requieren compensaciones extra. La respuesta es plana y se mantiene plana a cualquier distancia.
El efecto de proximidad es tanto mayor cuanto más ‘de puro gradiente’ es el micrófono. Es por tanto máximo en micros de tipo figura de ocho y va reduciéndose según pasamos por hipercardiode, supercardioide, cardioide, hipocardiode, hasta finalmente desaparecer en el tipo de respuesta omnidireccional. Pero sin olvidar que puede haber rara avis como los PMZ, porque en ellos la aparición de alguna forma de no omnidireccionalidad tiene una causa diferente a la de la actuación de un gradiente.
Que nos resulte útil aprovecharlo pegando el micrófono a la fuente o que tengamos que abrir mayor distancia para no incurrir en él lo dictarán las condiciones de cada grabación y cada fuente de sonido.

Pablo no puede callar cuando se habla de tecnologías audio/música. Doctor en teleco. Ha creado diversos dispositivos hard y soft y realizado programaciones para músicos y audiovisuales. Toca ocasionalmente en grupo por Madrid (teclados, claro).








