Si el recorrido de los controles es lineal, quiere decir que la función que le asigna valores de la señal de control al parámetro que quieres modificar es lineal, del tipo y = ax + b, siendo "x" el valor de la señal de control, "y" el valor del parámetro y "a" y "b" constantes. Esto quiere decir que el incremento es constante, por ejemplo:
Valor Tiempo
10 -> 30ms
20 -> 50ms
30 -> 70ms
40 -> 90ms
... -> ...
En este caso la función sería y = 2x + 10 (siendo 10 el "offset" o desplazamiento inicial), por lo que la función sería lineal. En el caso que comentas, el incremento es variable y se trata de una función exponencial.
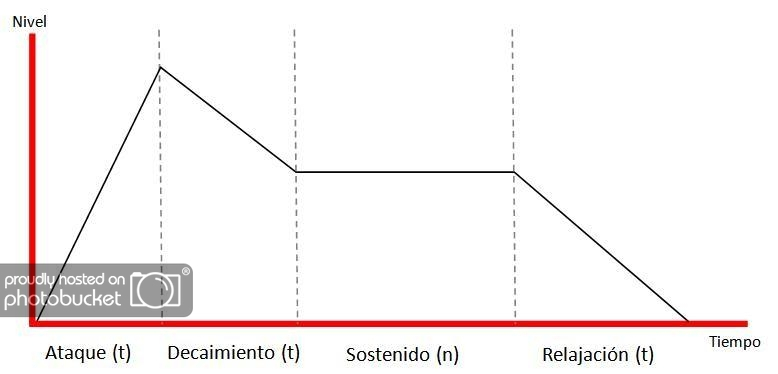
Otro tema es la curva de las envolventes, que no tiene nada que ver. El hecho de que una curva de envolvente sea lineal quiere decir que las líneas de la envolvente son rectas (esto es, que cada etapa puede expresarse mediante la función genérica que he mencionado arriba).
Caso de envolvente con curva lineal:
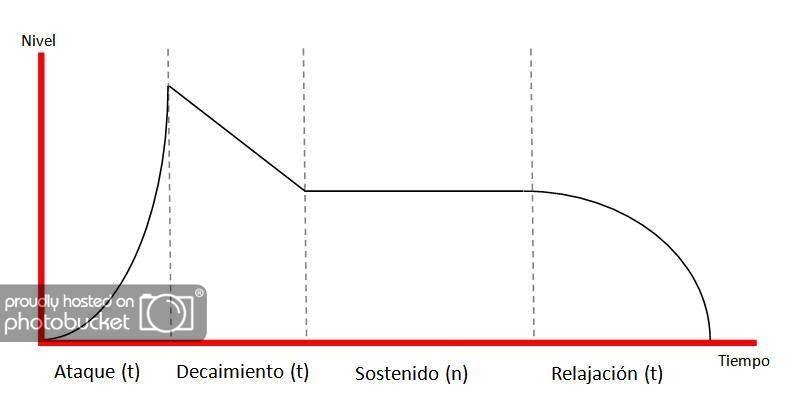
Y esta es una envolvente con ataque y relajación exponenciales:
Espero haberte sido de ayuda.
Un saludo.
Valor Tiempo
10 -> 30ms
20 -> 50ms
30 -> 70ms
40 -> 90ms
... -> ...
En este caso la función sería y = 2x + 10 (siendo 10 el "offset" o desplazamiento inicial), por lo que la función sería lineal. En el caso que comentas, el incremento es variable y se trata de una función exponencial.
Otro tema es la curva de las envolventes, que no tiene nada que ver. El hecho de que una curva de envolvente sea lineal quiere decir que las líneas de la envolvente son rectas (esto es, que cada etapa puede expresarse mediante la función genérica que he mencionado arriba).
Caso de envolvente con curva lineal:
Y esta es una envolvente con ataque y relajación exponenciales:
Espero haberte sido de ayuda.
Un saludo.